심해 1만900m "엄지 위에 코끼리 올려놓는" 수압서도 작동
심해어 영감 얻어 실리콘 안 장치 분산하고 옆지느러미 설치
(서울=연합뉴스) 엄남석 기자 = 바다 깊은 곳까지 잠수하는 심해 로봇이나 유인 잠수정은 엄청난 수압을 견디기 위해 두꺼운 금속 재질로 감싸다 보니 육중해져 움직임에 한계가 있을 수밖에 없다.
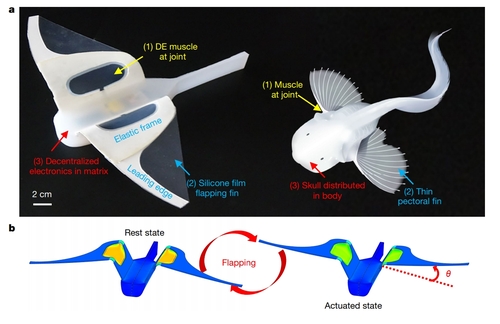
하지만 심해 물고기에서 영감을 얻어 연성 재질의 실리콘으로 만든 22㎝짜리 '소프트 로봇'이 바다에서도 가장 깊은 곳으로 꼽히는 마리아나 해구에서 성공적으로 작동해 심해 탐사의 새로운 장을 열게 될지 주목받고 있다.
과학전문 매체 '사이언스뉴스'(ScienceNews)와 네이처닷컴 등에 따르면 중국 저장(浙江)대학의 로봇공학자 리궈루이 박사가 이끄는 연구팀은 심해 탐사용 소프트 로봇의 현장실험 결과를 과학 저널 '네이처'(Nature) 최신호를 통해 발표했다.
리튬 배터리를 동력으로 한 이 소프트 로봇은 최대 수심 1만900m에 달하는 마리아나 해구의 수압을 견디며 작동했다. 이곳의 수압이 약 1억300만 파스칼로 해수면 기압의 1천배에 달한다.
뉴욕주립대 심해 생리학자 매켄지 게링거는 사이언스뉴스와의 인터뷰에서 이곳의 수압이 "엄지손가락 위에 코끼리를 올려놓는 것과 같다"고 설명했다.
심해 로봇 개발에서는 6천m 이상 초심해대 수압을 견딜 수 있는 장치를 고안하는 것이 가장 큰 난제였는데, 연구팀은 마리아나 해구 8천m 심해에 서식하는 '마리아나 꼼치'(Pseudoliparis swirei)에서 돌파구를 찾았다.
남중국해 3천200m 해저 자유유영 실험 장면 [네이처 제공]
우선 마리아나 꼼치의 머리를 완전한 하나의 뼈가 감싸고 있는 것이 아니라 중간중간에 구멍이 있어 압력을 분산하는 작용을 하는 것을 활용했다. 컴퓨터 칩과 배터리, 전압증폭장치 등 로봇에 필요한 각종 장치를 한곳에 모으지 않고 떨어뜨려 배치하고 실리콘으로 감싸 서로 닿지 않게했다.
또 꼼치의 모양을 본떠 양옆으로 두 개의 지느러미(fin)를 달고, 리튬 배터리에서 공급하는 소량의 전기로 수축과 팽창을 반복하는 인공근육과 연결함으로써 물속에서 앞으로 나아갈 수 있게 했다.
이렇게 만들어진 로봇은 실험실 수조를 거쳐 70m 깊이 호수와 남중국해의 3천200m 바다에서 자유롭게 헤엄치는 유영 실험을 성공적으로 마쳤다. 70m 깊이 호수에서 로봇은 초속 4㎝로 움직였다.
마리아나 해구의 '챌린저 해연'(海淵)에서 이뤄진 실험에서는 심해 착륙선의 로봇팔이 소프트 로봇을 잡은 상태에서 약 45분에 걸쳐 수압을 견디며 지느러미를 작동했다.
싱가포르국립대학 로봇공학자 체칠리아 라스키는 네이처에 실린 논평에서 로봇의 이동속도가 다른 해저 로봇에 비해 느리고 바닷속 해류를 버텨내는 힘도 약해 실용화되기까지는 아직 갈 길이 멀다고 했다.
마리아나 해구 실험장면. 로봇팔로 고정한 상태에서 지느러미만 작동하는 방식으로 진행됐다. [네이처 제공]
그러면서도 생물학적 영감을 받은 소프트 로봇으로 "달성할 수 있는 범주를 넓혀 놓았다"면서 미래에 이런 로봇이 심해의 미스터리를 풀 수 있는 "토대를 마련했다"고 평가했다.
연구팀은 앞으로 심해 소프트 로봇을 극단적인 조건에서 활용할 수 있게 지능과 기동성, 다양성, 효율을 강화하는 더 가볍고 유연한 재질과 구조를 개발하는데 초점을 맞춰나갈 것이라고 밝혔다.
eomns@yna.co.kr
(끝)
<저작권자(c) 연합뉴스, 무단 전재-재배포 금지>