아주대·미국 하버드대 연구진 성과 '사이언스 로보틱스'에 발표
(서울=연합뉴스) 신선미 기자 = 배터리 없이 구동하는 '오리가미(折紙·종이접기)' 로봇이 개발됐다. 종이로 색종이를 접어 배나 비행기를 만드는 것처럼, 편평한 소재를 접어 만든 로봇이다.
고제성 아주대 기계공학과 교수와 로버트 우드 미국 하버드대 교수팀은 이런 로봇을 개발해 19일 국제학술지 '사이언스 로보틱스'(Science Robotics)에 발표했다.
연구진이 만든 로봇은 삼각형 종이처럼 생긴 단순한 구조다. 무선으로 전력이 공급되면 이 로봇은 스스로 접히며 사면체형으로 변한다.

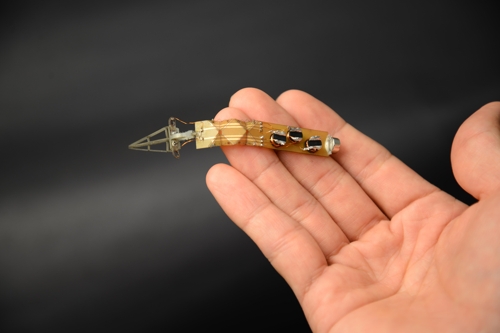
연구진은 잘 휘어지는 얇은 플라스틱 기판에 유리섬유 플라스틱을 덧대 로봇의 소재로 썼다. 접히는 부위에는 형상기억 소재를 붙였다. 형상기억 소재가 접힌 자국을 기억하고 있다가 원 상태로 돌아가는 성질을 이용해, 로봇이 '변신'하도록 했다.
로봇을 실제 종이접기 모형처럼 가볍게 만들기 위해 로봇의 구성요소인 '배터리'를 빼는 방법도 고안했다. 로봇은 배터리 대신 코일에서 유도되는 '전자기장 공진'(Electromagnetic resonance)에 의해 구동된다. 도체 주변의 자기장 변화로 유도되는 전류를 간단한 전자 소자로 특정 주파수에서 증폭하는 방식이다.
고제성 교수는 "이번 연구에서 로봇의 파워(power) 문제에 대한 해법을 제안했다"라며 "작은 배터리를 넣어주면 소형 로봇을 수분 가량만 운용할 수 있는데, 외부전원에서 전력을 무선으로 공급해주면 이런 시간 제약이 사라진다"고 밝혔다.
종이접기 방식을 쓰면 쉽고 빠르게 새로운 모양의 로봇을 만들 수 있다. 프린터에 소재를 넣고 전개도를 출력한 뒤, 전개도대로 접어주기만 하면 된다.
고 교수는 "평면 설계 및 제작이 가능하고 조립 과정을 없앨 수도 있어, 기존 로봇 제작과 비교해 비용과 시간을 대폭 줄일 수 있다"라며 "작게 만들어 사람의 몸속을 돌아다니거나 사람이 접근하기 어려운 우주 공간, 방사능 오염 지역에서 쓸 수 있는 소형 로봇을 제작하는데도 이런 방식이 유용할 것"이라고 설명했다.
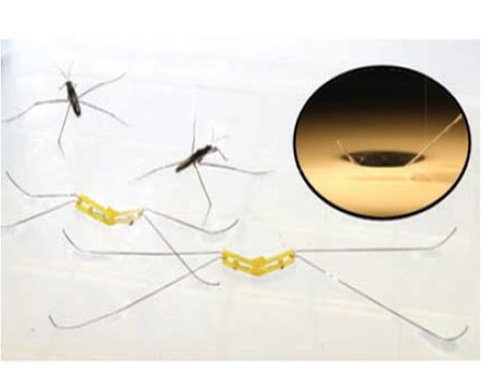
한편 고제성 교수는 2015년 서울대 연구원으로 재직할 때 수면에서 점프하는 소금쟁이 로봇을 개발, 연구 결과를 '사이언스'(Science)에 발표한 바 있다.
sun@yna.co.kr
(끝)
<저작권자(c) 연합뉴스, 무단 전재-재배포 금지>